




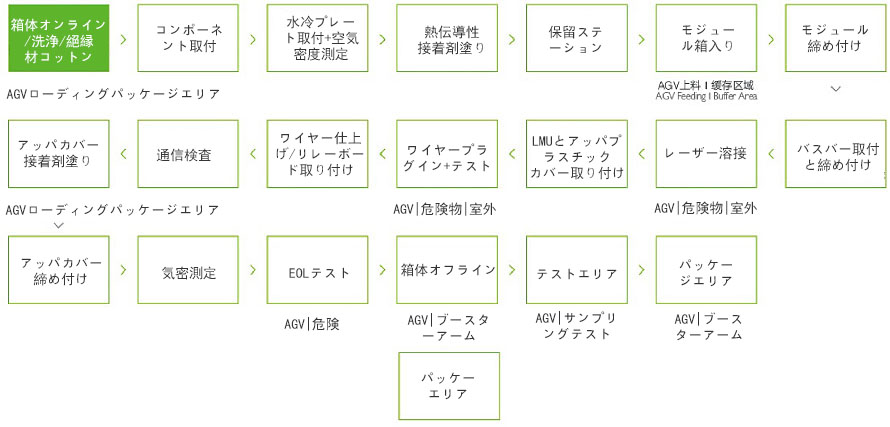
主に箱体のオンライン処理、冷却システムの設置、モジュール箱入り、モジュールロック、PACKテストの全プロセスを含まれます。全生産ラインは全AGV運転方式を採用し、運行は安全で信頼性が高く、処理効率が高く、互換性と拡張性が極めて高く、現在市場のほとんどすべてのメーカーの電池PACKの組立生産に適用されています。
1、モジュール箱入り:
AGVは計画ルートに沿ってこのステーションに到着した後、正確に位置を決めます。ロボットは調合順序に従って、モジュールを下箱体の中に入れて、ロボットのグリップは同じセルの異なる長さのモジュールと互換性があります。ロボットには視覚システムが配置され、モジュールを掴む前とモジュールを箱に入れる前に写真を撮影して位置決めし、ロボットの掴むに誘導を提供します。
2、モジュールロック:
ロボットは自動的にモジュールのネジを締め付けます。締め付けガンは、締め付けごとのトルク値を記録し、MESシステムにアップロードして保存します。
3、PACKテスト:
プラグインワイヤーハーネスはEOLテストキャビネットに接続され、EOLは自動的にテストを行います。製品の絶縁性能、BMSシステム性能、電池充放電性能、動力回線性能、I/O機能などの各パラメータを全面的に検査し、MESシステムにアップロードして保存します。

華数錦明ウィーチャット公式アカウント
所在地:江蘇省常州市武進ハイテク産業開発区西湖路16号 電話番号:0512-6288 6809 メールアドレス:robot.sales@hj-robot.com
著作権:常州華数錦明智能装備技術研究院有限公司 蘇ICP備18008015号-1